- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

メカニズムパネルの設計とインストールに必要なスキルと知識は何ですか?
2024-09-18
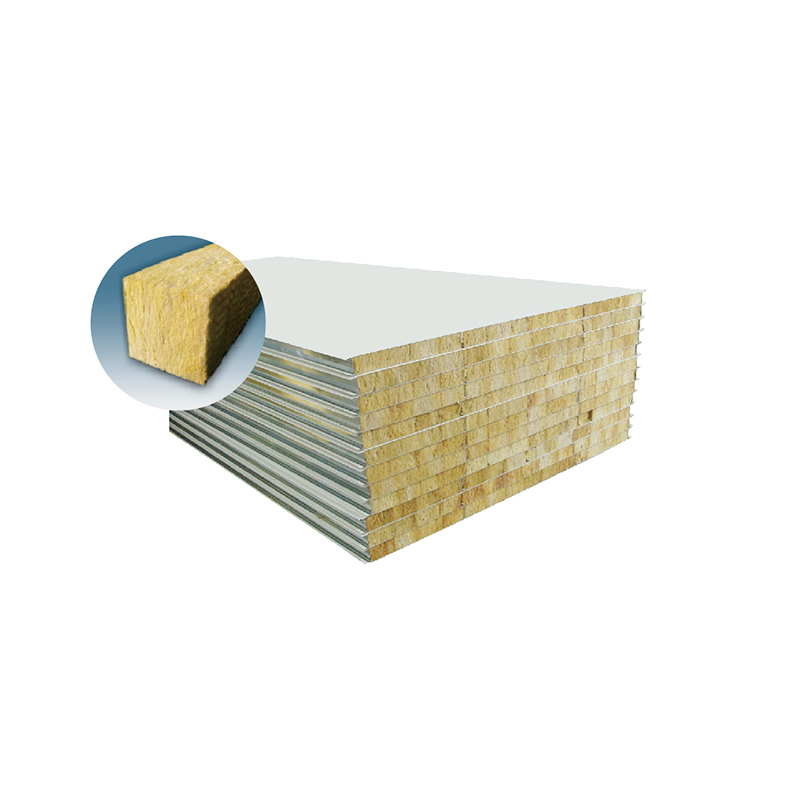
メカニズムパネルさまざまな制御機能を1つのパネルに統合するデバイスの一種です。自動化、機械、機器の分野で広く使用されています。メカニズムパネルは、モーター、ポンプ、バルブなどのデバイスを制御および監視できます。また、温度、圧力、その他の物理量をリアルタイムで監視することもできます。メカニズムパネルの設計と設置では、パネルが正しく効率的に機能できるように、特定のスキルと知識が必要です。
メカニズムパネルを設計するために必要な技術的スキルは何ですか?
メカニズムパネルの設計には、電気工学や機械工学などの技術的スキルの組み合わせが必要です。設計者は、電気回路、電源システム、プログラミング言語、および通信プロトコルを深く理解する必要があります。 AutoCADやSolidWorksなどのソフトウェアパッケージに精通していることも必要です。
メカニズムパネルをインストールする際の安全上の考慮事項は何ですか?
メカニズムパネルを設置するには、高電圧電気を操作することが含まれます。これは、電気ショックの重大なリスクをもたらします。保護具の着用や標準的な操作手順に従うなど、設置中の事故を防ぐためには、安全対策を講じる必要があります。
メカニズムパネルが順守しなければならない品質基準は何ですか?
メカニズムパネルは、ISO 9001やCE認証など、さまざまな品質基準を順守する必要があります。これらの標準は、パネルが安全で信頼性が高く、国際的な品質ベンチマークを満たすことを保証します。
産業用オートメーションでメカニズムパネルを使用することの利点は何ですか?
産業用自動化でメカニズムパネルを使用することの利点は多数あります。プロセスを自動化することにより、機器の効率が向上します。また、ダウンタイムの短縮と生産性の向上にも役立ちます。メカニズムパネルは、特定の要件を満たすようにカスタマイズでき、業界固有のアプリケーションに理想的な選択肢となります。
メカニズムパネルのメンテナンスはどれほど重要ですか?
メンテナンスは、メカニズムパネルが適切な機能と寿命を確保するために不可欠です。定期的なメンテナンスは、潜在的な問題を検出し、より重要な問題になる前にそれらを修正するのに役立ちます。また、パネルの寿命を延ばし、そのパフォーマンスを最適化するのにも役立ちます。
要約するには、メカニズムパネルの設計とインストールには、技術的なスキル、安全性に関する考慮事項、品質基準の順守、カスタマイズ、メンテナンスの組み合わせが必要です。パネルが効率的かつ確実に機能できるようにするために、資格のある専門家を持つことが重要です。
Suzhou Jinda Purification Engineering Equipment Co.、Ltd。は、中国のメカニズムパネルの大手メーカーです。私たちは、国際的な品質基準を満たす高品質のメカニズムパネルを設計および設置するための技術的な専門知識と経験を持っています。当社のパネルは、特定の顧客要件を満たすようにカスタマイズされています。当社の製品やサービスについて質問やお問い合わせがある場合は、までお問い合わせください1678182210@qq.com.学術記事:
改善されたニューラルネットワークに基づいた産業用ロボットのスライドモード制御。 Li、X。、&Wang、H。(2019)。 IEEEアクセス、7、178738-178745。
アダムスに基づくロボット制御システム用のシミュレーションプラットフォームの設計。 Xu、Y。、&Zhang、Q。(2018)。 Journal of Physics:Conferenceシリーズ、1075(4)、042002。
スクリュー押出機のタイミングベルト伝送システムの最適な設計。 Li、Y.、Zhao、Y.、Gong、X.、Zhang、X。、&Lin、J。(2019)。 Journal of Physics:Conferenceシリーズ、1185(5)、052087。
電気自動車駆動モーターのためのジョイントスペースベクトル変調アルゴリズムのFPGAベースの実現。 Xie、Y.、Pan、H。、&Zhao、B。(2020)。 IEEEアクセス、8、55595-55603。
ホットプレッシングダイキャスティングマシンにおける4次元フロー制御システムの適用と最適化。 Yang、Y.、Wu、H.、Liu、J。、およびNie、Y。(2021)。 Journal of Machical Engineering Research and Developments、44(1)、89-95。
宇宙船の態度制御のためのインテリジェントコントロールシステムの分析と設計。 Li、S.、Xu、Z。、およびWei、X。(2018)。 Journal of Spacecraft TT&C Technology、18(5)、53-60。
頻度とベイジアン主義に基づく断層診断アルゴリズムの確率的堅牢性分析。 Liu、Y。、&Wu、W。(2020)。センサー、20(15)、4117。
線形モーター用の複合堅牢なコントローラーの設計とシミュレーション。 Guo、J.、Li、Y.、Sun、W.、Wang、Y.、Cheng、Y。、&Zhang、X。(2019)。 Journal of Physics:Conferenceシリーズ、1168(3)、032037。
MEMSテクノロジーに基づいたステアリングホイール角度センサーの設計。 Cheng、W。、&Wang、Y。(2020)。 Journal of Physics:Conferenceシリーズ、1481(2)、022016。
Kalmanフィルターを使用したAHRSファイバージャイロの二重閉ループPI制御の分析。 Xiao、X.、Xie、H.、Li、G.、Wang、J.、He、W。、&Li、G。(2020)。 Journal of Physics:Conferenceシリーズ、1512(1)、012014。
油圧掘削リグのスティックスリップ速度制御システムの設計。 Li、Z。、およびGao、J。(2018)。 Journal of Physics:Conferenceシリーズ、1077(6)、062011。